









Rencontre avec Sarah Duduyer, ingénieure navale à la barre du nouveau navire semi-hauturier Manche Atlantique
Originaire de l’île de Ré, Sarah Duduyer nourrit depuis l’enfance une passion pour l’océan, la navigation, la construction navale. Après avoir étudié à l’École centrale de Lyon et achevé son cursus d’ingénieur à l’université de Southampton en Angleterre, elle intègre l’Ifremer en 2004 au sein de l’unité Navires et systèmes embarqués. En 2017, Sarah Duduyer orchestre avec brio la modernisation du Thalassa. Elle pilote, désormais, la construction du nouveau navire semi-hauturier qui devrait voir le jour en 2025. Une étape majeure pour la Flotte océanographique française opérée par l’Ifremer.

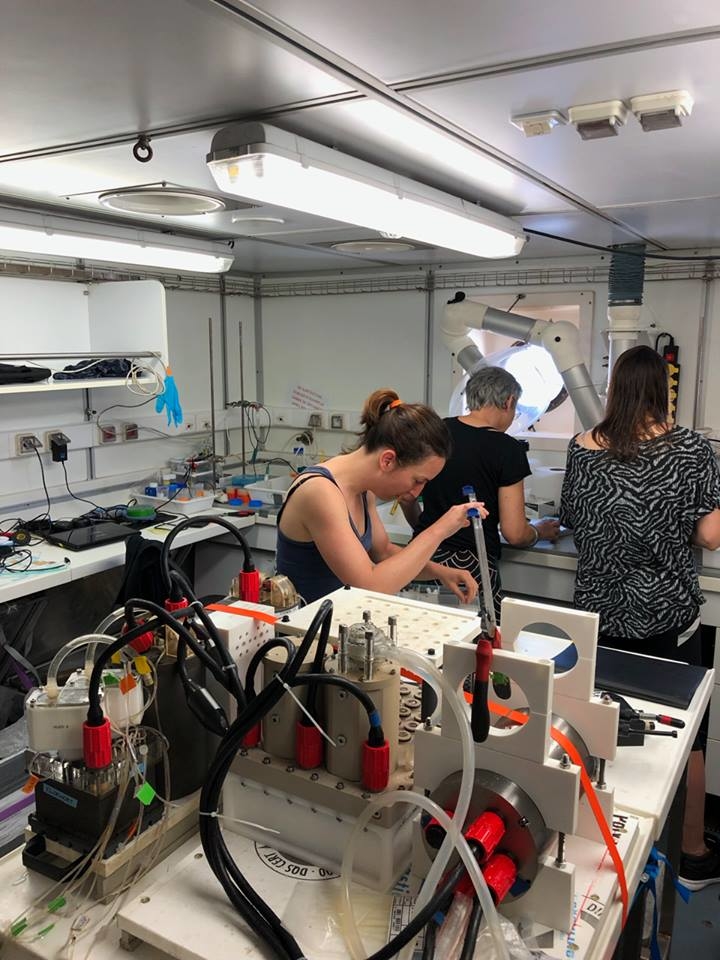
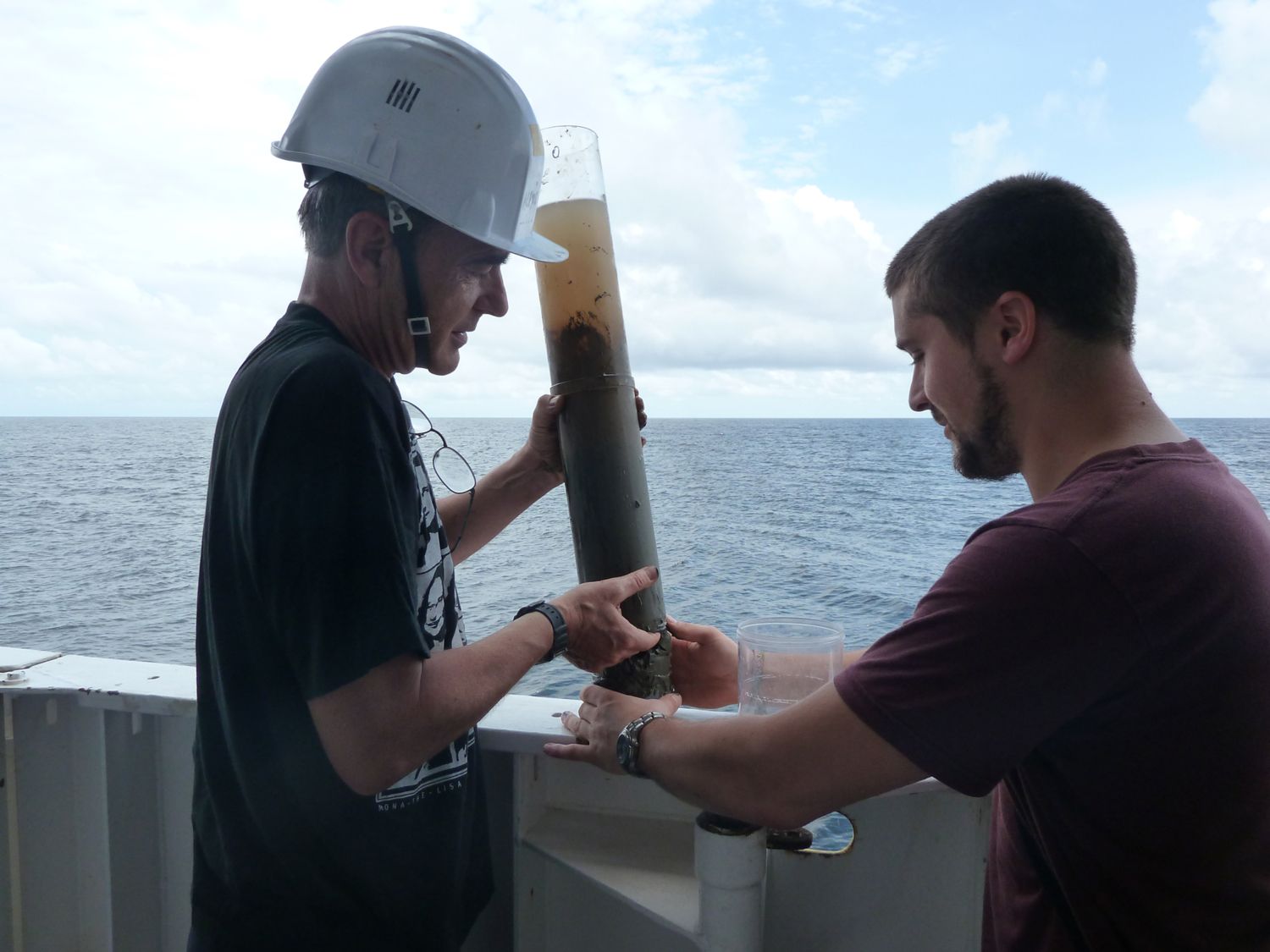
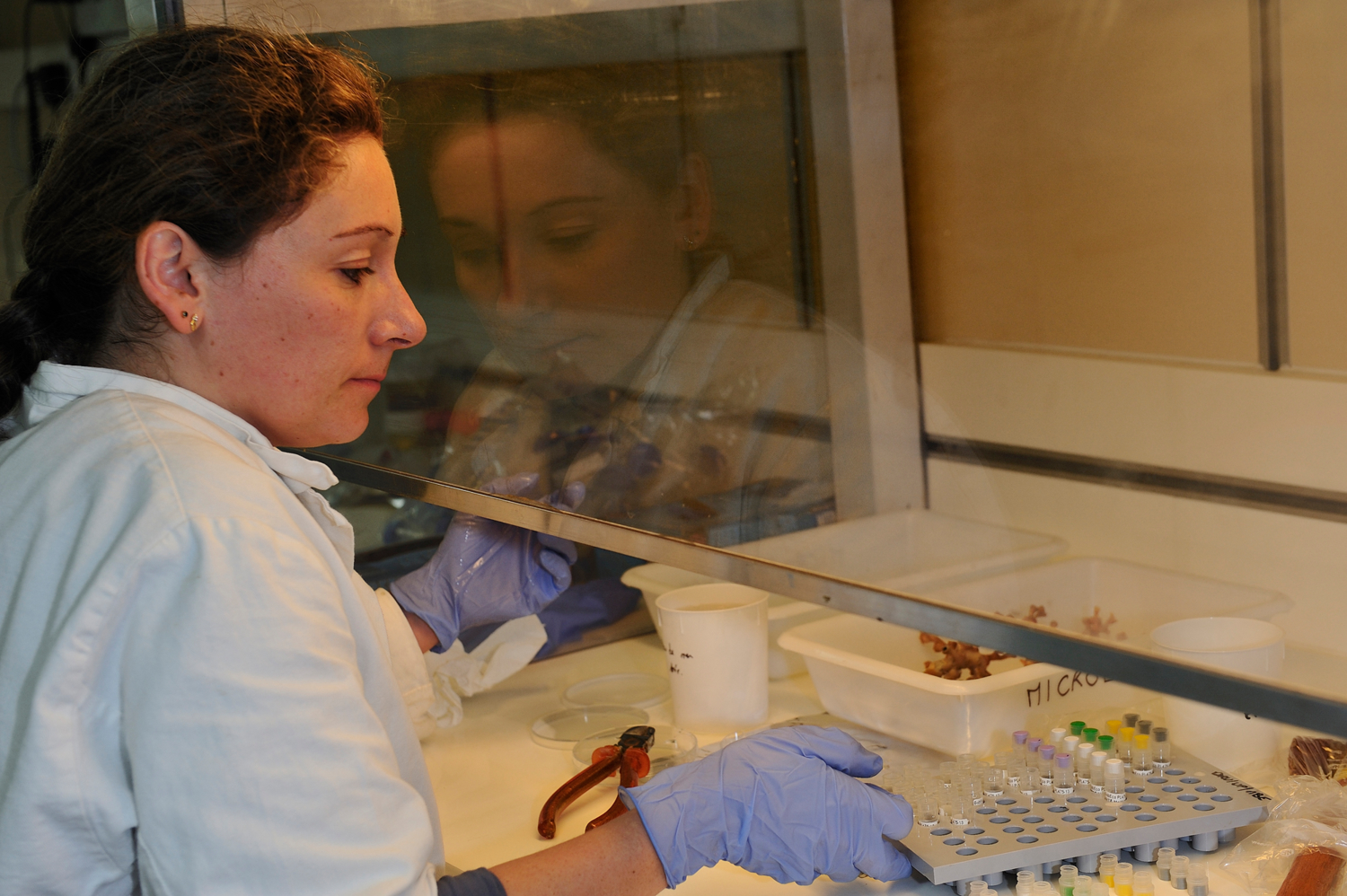
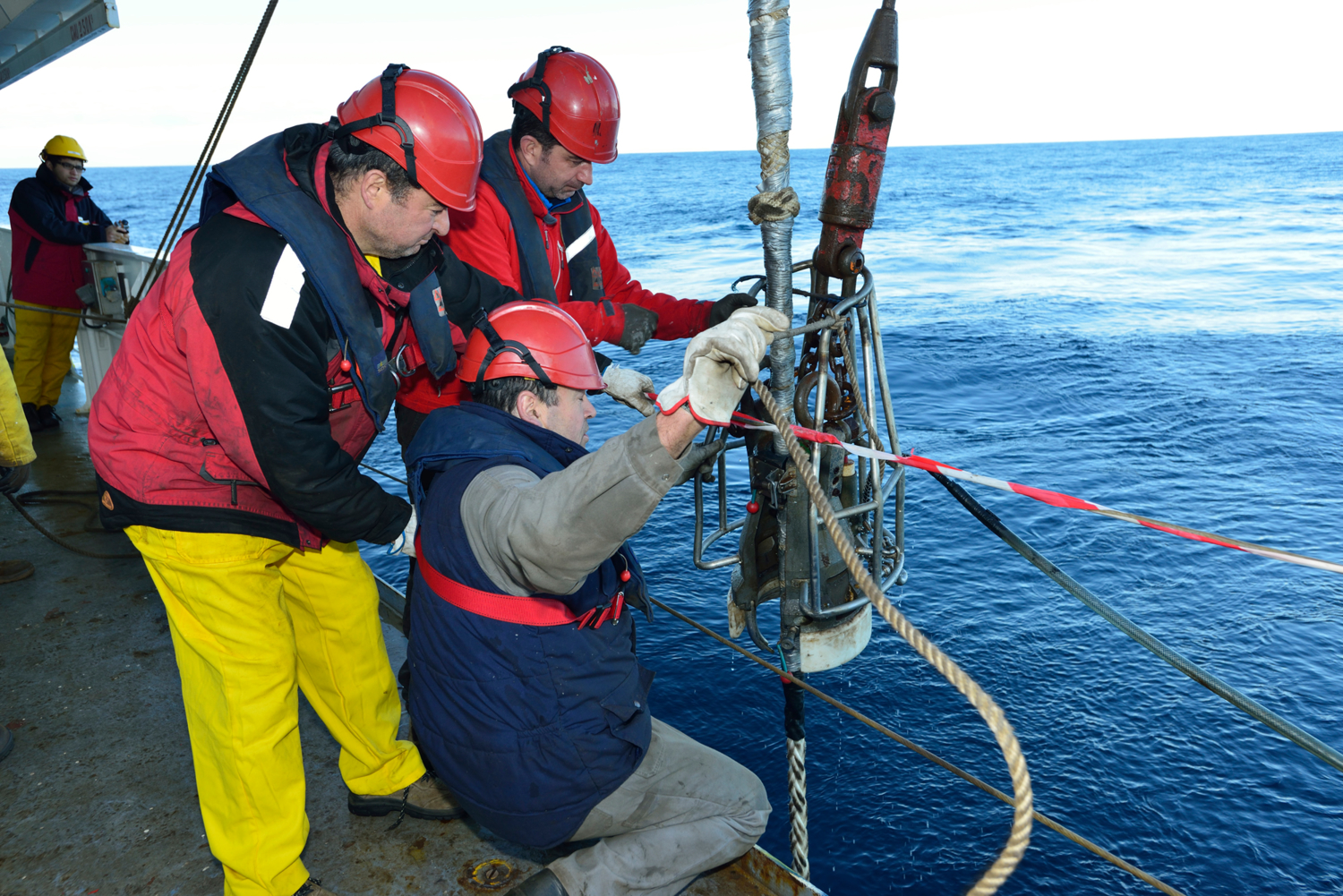
Campagne Apero : Comment l’océan stocke-t-il le carbone ?
Du 2 juin au 17 juillet 2023, le Thalassa et le Pourquoi pas ? sillonnent l’Atlantique Nord-Est au large de l’Islande et de l’Irlande. Co-dirigée par des chercheurs du CNRS, la campagne Apero vise à identifier les conséquences du changement climatique sur la capacité de l’océan à absorber le carbone.

Rencontres de la Flotte 2021
Rassemblant la communauté nationale des sciences océaniques, la 1re édition des Rencontres de la Flotte océanographique française s'est déroulée du 29 mars au 1er avril 2021. Ces journées ont offert l'occasion de faire un point sur l'importance de cette très grande infrastructure de recherche, l'une des cinq plus grandes au monde. Parce que la recherche scientifique et la collecte de données sont aujourd'hui essentielles pour mieux connaître et protéger l'océan, la Flotte océanographique française sillonne les mers du globe, au service de plus de 3000 scientifiques.
Agenda

Chiffres clés annuels























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}